- The nuclear battery is already a reality. It can change everything with its 100-year lifespan
- Google and Harvard surprise with an artificial intelligence that mimics the human brain
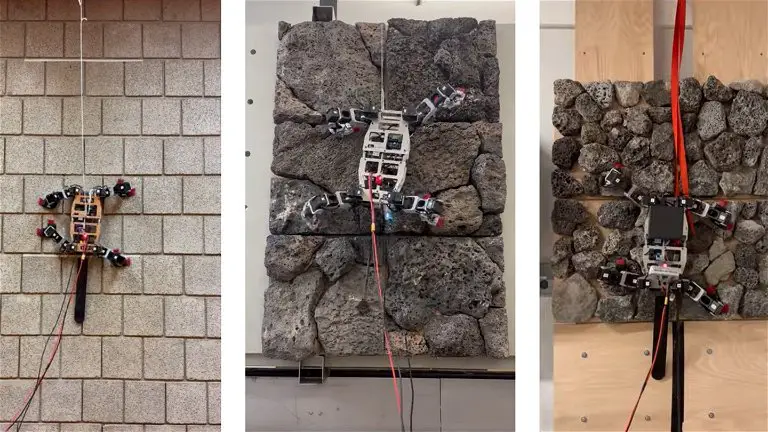
LORIS is a wall-climbing robot whose name is the same as that of one of the best-known primates, but the climbing system it uses is based on insects: from its four limbs it releases two diagonally opposite ones to hold on higher while being anchored with the other two, also diagonally opposed. For a correct grip, at the end of each limb it integrates micro-tweezers with tiny hooks that adhere to practically any surface.
How LORIS works
The world of robotics strives every day to design machines capable of performing tasks in the most efficient way. One task is to execute actions as quickly as possible, another is to move in the most human-like way and we also have climbing. There are robots capable of climbing surfaces with suction systems, applying suction to their legs to stick to the surface; However, undertaking a climb is complicated when they try to ascend a surface with gaps, which is not smooth enough, as they are unable to seal the suction without air escaping.
The alternative to this system is microspine tweezers. The robots have hooks that grip the wall using tiny, sharp microspines that slip through the nooks and crannies of the surface. The problem with this system is that it is efficient on walls that are always vertical, but it is not efficient on those that vary their angle, leaning more in some parts, such as cliffs. To alleviate these problems, some integrate hooks that sink into a surface, but they usually consume too much energy and resources.
The solution is LORIS, a robot named after the animal, as its acronym stands for ‘Lightweight Observation Robot for Irregular Slopes’. It is a lightweight robot with microspine hooks located at the end of each of its four limbs. The difference with respect to the other microspine hook thefts is that it has two groups of pincers on each limb and rotability on each of the limbs, for greater operability, in addition to weighing very little.
Apart from that, its diagonal grip system is basic. He always holds two diagonally opposite limbs together, for example, his left “arm” and his right “leg”, although actually all his limbs are identical legs. Both limbs apply force to the inside of their grippers, which keeps them in place while the other two, also diagonally opposed, seek to hook onto another part of the wall. This is an insect-inspired system called inward-directed grasping (DIG).
To know where to hook up and how to move forward, LORIS uses the depth-sensing camera that it integrates, along with a microprocessor. However, these components and their design themselves do not make it expensive, according to its creators, who emphasize that it is simple and cheap to manufacture.
It has been created by Paul Nadan, Spencer Backus, Aaron M. Johnson, and some colleagues at the Robomechanics Laboratory at Carnegie Mellon University. If you want to know more about how it works, this publication from the university offers more information about it.

Comments