
There’s more to this drone than meets the eye. The team behind this ‘bot took inspiration from nature to design a device capable of morphing to suit its environment, transforming to most efficiently tackle the challenge in front of it.
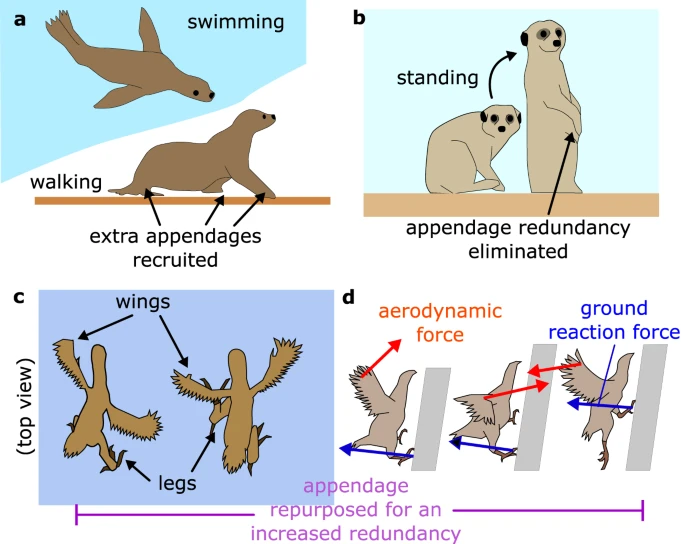
Animals use their bodies in various ways to suit different terrain. Meerkats may not be great at walking on two legs but they can stand up when they need to to scout out their surroundings.
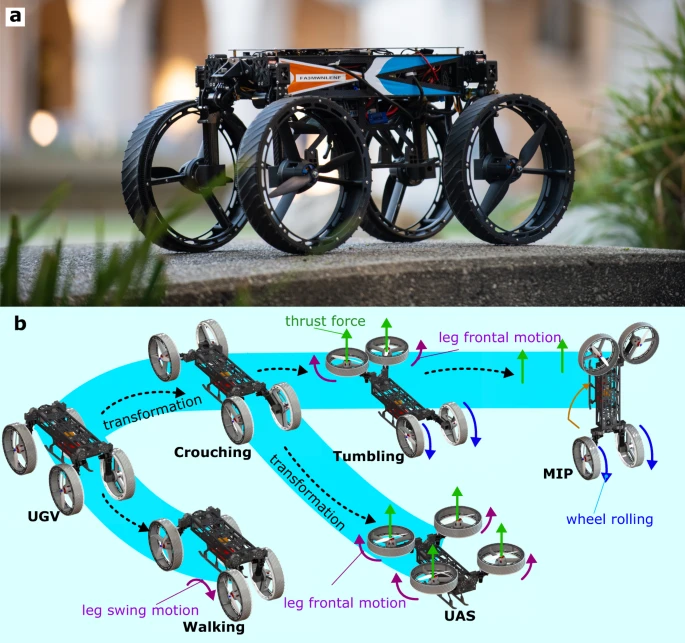
Turtle flippers may be optimized for swimming but they can also haul the reptiles up a beach when needed. And it was this ability to use appendages for multiple functions that inspired the design of this robot named the multimodal mobility morphobot or M4 for short.

M4 isn’t the first robot to move in multiple ways but the researchers behind it say that previous designs mostly fell into one of two camps those with ‘morpho’ functionality like this robot that can reshape its limbs to walk or swim, or those that use redundancy – having a set of wheels and propeller blades to travel on land or the sea. But M4 is different, it can perform a variety of tasks by using its same limbs in different ways just like an animal changing its posture or gait – thus finding a sweet spot between redundancy and the ability to change shape and function.
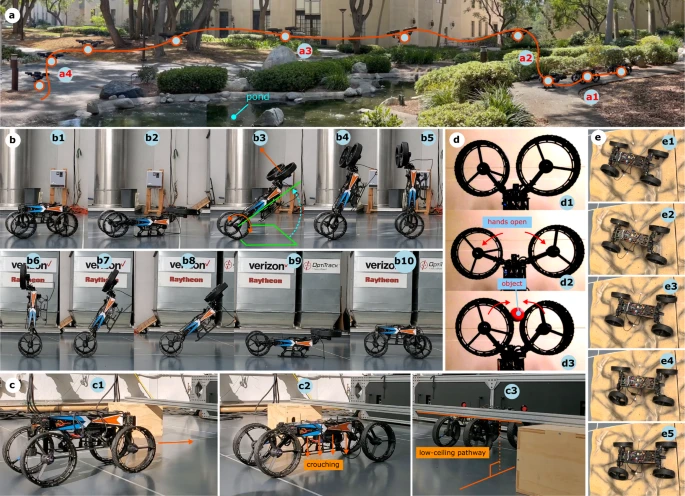
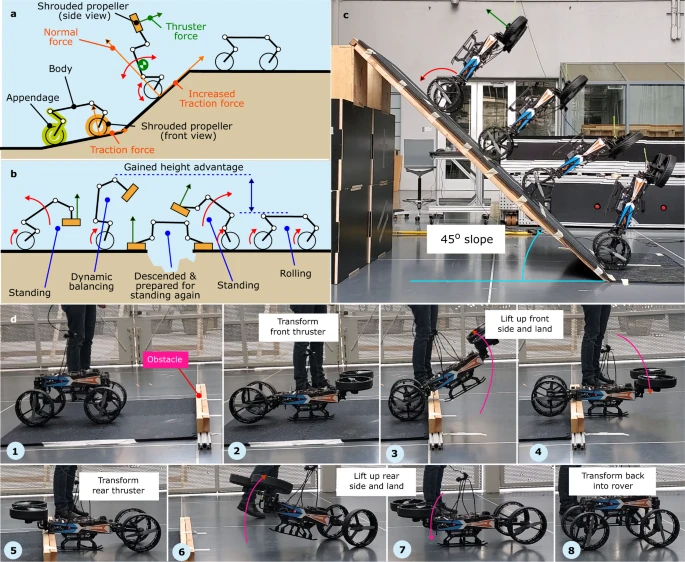
In practice what this means is that M4 can fly and roll as you might expect, but also tumble over obstacles. Balance on one end. Crouch under barriers. And crawl over rocky terrain. It can even manipulate this ball using two of its propellers like hands. When presented with a 45 degree ramp too steep for wheels alone, the team took inspiration from the Chukka Partridge which uses its wings to help it run up inclines. They instructed M4 to do something similar.
M4 could of course just fly up the ramp, but rotors use much more energy than wheels and so by combining the two modes M4 can achieve the same goal much more efficiently.
The researchers argued that this morphobot could be used for everything from search and rescue to future space missions and want to expand on their design to give M4 more sophisticated tools and greater articulation. They are also working on algorithms that could allow M4 to interpret data from sensors and autonomously choose its mode of transport based on its surroundings – be that rolling flying or something in between.

Comments